
No products in the cart.
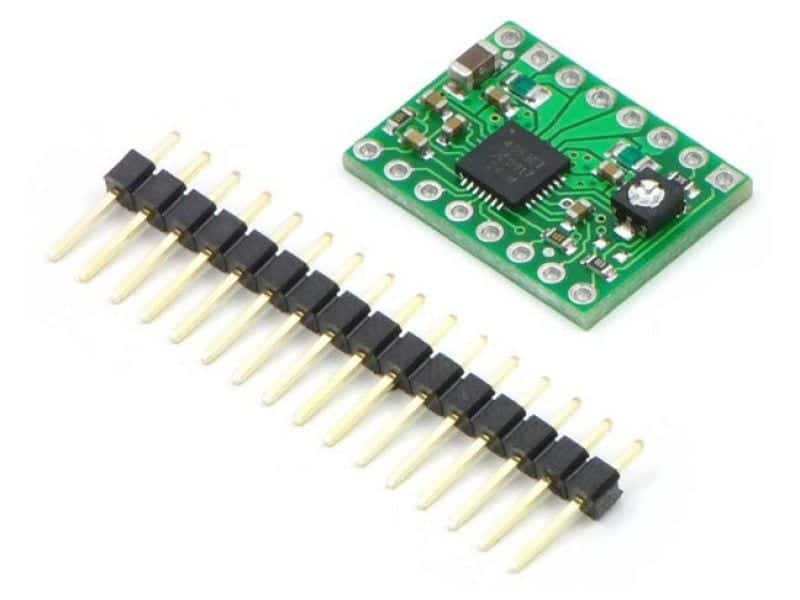
The Allegro A4988 stepper motor driver carrier by Pololu is an excellent, compact stepper motor driver used in many DIY projects, particularly 3D printers.
$19.59 CAD
You save (%)
RepRaps, Makerbots, Printrbots, String-drawing robots… you see these devices all over the open-source hardware world these days, and yo know what they have in common? Stepper motors. They’re relatively cheap, precise, powerful, and … a son-f-a-gun to make move properly. But since big IC companies also see how useful they are, there’s a large variety of ways to connect and power the 4, 6, & 8 wires that are needed to make a stepper motor move. And Pololu does a great job of making boards that use these chips!
Specifications:
For more current-handling capacity in exactly the same footprint, see the “Black” edition
| Weight | 0.0034 kg |
|---|---|
| Dimensions | 7 × 6.5 × 0.4 cm |
| Availability | Available Online |
| Motors | |
| Type |
Only logged in customers who have purchased this product may leave a review.

Reviews
There are no reviews yet.